
ATLAS e-News
23 February 2011
Can we find b-jets even with a misaligned detector?
29 June 2009
b-tagging is an essential tool for the ATLAS physics program. Precise identification of b-jets helps to significantly reduce background for a number of interesting channels, in particular Higgs, SUSY, and, of course, ttbar production. The performance of the b-tagging algorithms is naturally affected by the quality of its inputs: reconstructed tracks and vertices. The precision of tracking and vertexing depends not only on the intrinsic resolution of the detector modules but also on our knowledge of the position of the physical detector – the alignment of the detector.
Although the alignment group is doing their best to make the misalignment as small as possible, the detector alignment will not be perfect. This will be especially true for the first days of data taking where our understanding of the detector will be relatively crude. Misalignment can lead to the degradation of the tracking and vertexing resolution and so to loss of b-tagging performance. Therefore a dedicated study was done last year during the CSC exercise to determine how misalignment affects b-tagging.
To study the effects of misalignment, a number of different alignment scenarios were considered. First, module and substructure displacements were introduced at the level of the GEANT4 simulation. These misalignments were meant to represent the typical placement precision of the physical devices. Afterwards, alignment corrections were calculated and introduced at the reconstruction level to mimic the process expected when real data arrives. Four different types of alignment corrections were considered. The first alignment was identical to the one used in simulation, so the reconstruction did not see any misalignment. This was called “perfect” alignment. The remaining three cases represented aligning the detector to varying degrees of accuracy.
The first of the three residual misalignment cases was called the “aligned” scenario. It used the alignment constants developed by the alignment group using actual ATLAS alignment procedures. It was the most realistic case in the study. The other two scenarios introduced random misplacements of the order of 10 and 5 microns, respectively. The random misalignment was applied to the Pixel detector only. All pixel modules, pixel layers, and endcap disks were randomly shifted and rotated. Finally, the whole Pixel detector was shifted and rotated with respect to the rest of ATLAS. The performance of b-tagging for different alignment scenarios is shown in the figure below.
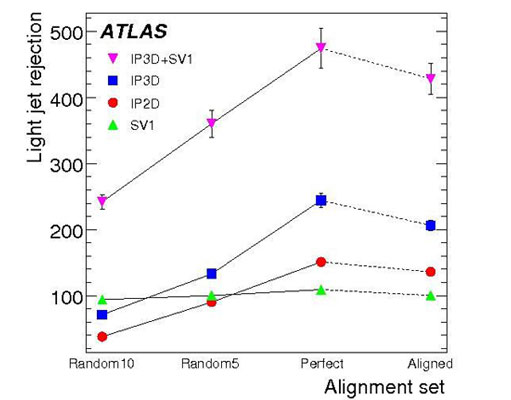
Performance of various b-taggers with different mis-alignment scenariosand error scaling applied. IP refers to the impact parameter method in 2D or 3D, whereas SV1 stands for Secondary Vertex method.
A good understanding of track parameter errors starts with an accurate calculation of the intrinsic errors of the track hits. The hit error depends on several factors such as cluster topology and particle direction. The difference between the real positions of the hits and the ones recorded by misaligned detector modules leads to an additional error term. The wrong determination of the intrinsic error has a direct effect on the track parameter errors and can also lead to the incorrect association of hits to tracks. Therefore it has an effect on all tools that use tracks as an input, such as vertexing and b-tagging. Therefore a procedure for correct determination of the intrinsic hit errors in the face of misalignment was developed. It was based on error scaling where different parameters were added in quadrature to the hit errors in different parts of the inner detector.
In the study, the standard samples for determining b-tagging performance were used, namely the WH (mH=120 GeV) – Higgs boson produced in association with a W boson and a ttbar sample with the top pair decaying semileptonically.
The b-tagging algorithms that rely on track impact parameter to separate b-quark jets from light jets have ‘IP’ in their name, while the ones relying on a reconstructed secondary vertex contain 'SV' in their name. Although there are other b-taggers available, this study considered only the IP and SV b-taggers.
The performance in the ttbar sample is shown in the second figure where rejection vs. efficiency curves are shown for the b-tagger called IP3D+SV1 for the different alignment scenarios, with and without the help of error scaling. The displayed b-tagger belongs to the category of ‘combined’ b-taggers that combine the powers of several inputs, in this case the impact parameter (transversal and longitudinal – that is why it has 3D in the name) and the properties of reconstructed secondary vertex. This b-tagger is also the most powerful of the b-taggers considered in this study.
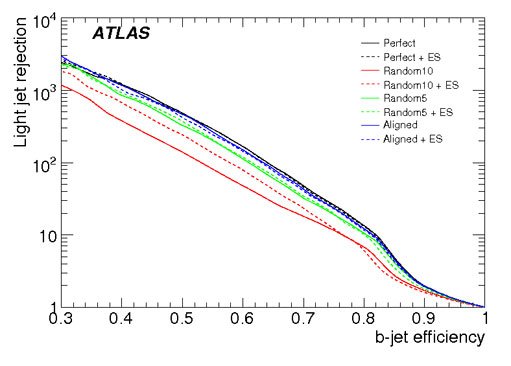
The light jet rejection versus b-jet tagging efficiency for different algorithms, including or not error scaling (ES).
The figure clearly shows that the performance of b-tagging drops in a misaligned detector. The scenario with the largest random misalignment causes almost 50% drop in efficiency. Nevertheless, the figure also shows that the error scaling method enables us to recover a significant portion of the performance leaving us only with a marginal loss even for considerable misalignment. The results for the WH sample confirmed this observation.
What is also interesting is the comparison of performance of different b-taggers. This is shown in the first figure. The picture shows the rejection for four different b-taggers in the four alignment scenarios with the application of error scaling. Performance of all IP b-taggers decreased with misalignment, while the secondary vertex based b-taggers keep the same performance regardless of misalignment. The best performance was observed for the combined b-tagger.
To sum up, the study observed that b-tagging efficiency is degraded with increasing level of misalignment. Also observed was that the usage of error scaling can recover large portion of lost performance for scenarios with large misalignment. In fact, it was shown that the performance of the secondary vertex b-taggers is little affected by misalignment and that the performance for impact parameter based b-taggers can be restored with error scaling. This robustness of b-tagging with respect to the misalignment means that b-tagging with reasonable quality will be possible even with the data from the first LHC runs. This study, however, is not the last word in the b-tagging vs. misalignment problem. There is still the unresolved question of the impact of so-called weak modes (systematic global deformations, such as a twist of the detector, that are not well constrained by the alignment procedure) on b-tagging which is being investigated right now. Regardless, b-tagging is well prepared for the beginning of data taking period and for the surprises that may come from detector alignment!

Monika PanuskovaAcademy of Sciences of the
|